(WIP)[Paper Review] Graph Neural Networks for Multi-Robot Active Information Acquisition
Graph Neural Networks for Multi-Robot Active Information Acquisition
Author: Mariliza Tzes, Nikolas Bousias, Evangelos Chatzipantazis and George J. Pappas
ICRA 2023
Abstract
Graph communication으로 관심 현상(phenomena of interest)의 hidden state를 추측하는 로봇들의 Active Information Acquisition(AIA) 문제를 다루었다. (예로 target tracking, coverage, SLAM 등이 있다.)
기존 연구는 확장 가능하지 않고(scalable)하지 않고 동적인 현상(dynamic phenomena)를 다루지 못하며, graph의 변화에 강건(robust)하지 않다.
이러한 문제를 해결하기 위하여 Graph Neural Network(GNN)에 AIA를 접목한 Information-aware Graph Block Network(I-GBNet)을 제안한다.
I-GBNet은 그래프 상의 정보를 종합하여 분산된 방식(distributed manner)으로 순차적 의사결정(sequential decision-making)을 가능하게 한다.
모방학습(imitation learning)으로 centralized sampling-based expert solver를 학습한다.
Permutation equivariance[^permutation_equivariance]하고 time invariant하면서 처음 보는 환경에 높은 scalability, robustness, generalizability를 보여주었다.
I. Introduction
AIA(Active Information Acquisition)
여러 measurement를 이용하여 hidden state를 능동적으로 추정하여 효율적인 경로를 설계하는 과정.
모니터링, 구조, 감시, Active-SLAM 등에 응용된다.
Related Works
AIA 문제에 대한 선행 연구는 크게 근시적(myopic) 접근과 비근시적(non-myopic) 접근으로 이루어져 있다.
- Myopic approach
- Computing controller에 의존
- 이는 불확실성에 즉각적인 영향을 초래
- Non-myopic approach
- Search-based, 측정 과정에서 가지치기(pruning)하여 통해 문제 해결
- Informative paths 계산이 빠름
- Decentralized counterparts는 coordinate descent에만 의존
- 로봇의 수가 많아지거나 planning horizon이 증가할 시 수학적으로 다루기 어려움(intractable)
두 접근법 모두 scalable하지 않고 그래프 구조에 대해 robust하지 않으며 dynamic한 현상을 설명하기 어렵다는 단점이 존재한다.
GNNs(Graph Neural Networks)
GNN은 그래프를 통해 신호를 처리하는 정보 처리 구조로 분산된 구조를 가지고 있기 때문에 multi-robot 응용 분야에 쉽게 적용할 수 있다. 노드는 로봇으로 에지는 로봇 간 통신으로 표현.
그래프 구조의 특징으로 그래프의 토폴로지에 변화에 강인하고(robustness)와 로봇의 수에 따른 확장성(scalability)을 증가시킬 가능성이 있다.
Contribution
본 논문에서는 위에 서술한 분산 AIA 문제를 해결하기 위해 GNN을 적용한 architecture를 제안한다.
특히 multi-robot의 정보 수집 문제를 그래프로 표현하고 순차적 의사결정(sequential decision-making)으로 공식화하였다.
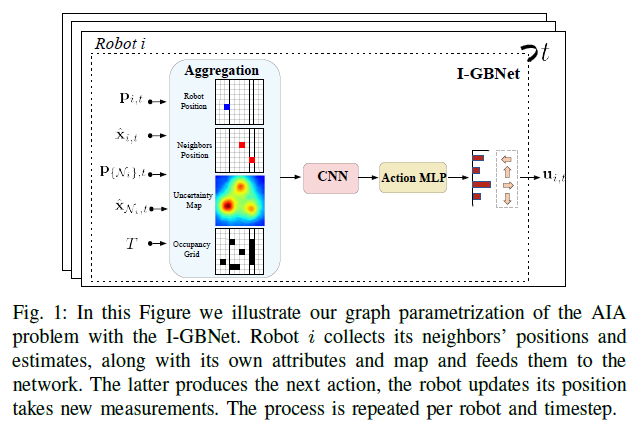
I-GBNet은 로봇이 능동적으로 POI(phenomenon of interest)의 상태를 추정하기 위해 제어하는 법을 학습한다.(각 로봇은 이웃에게 받아온 위치와 추정값을 통해 다음 입력 제어 신호를 생성한다.)
신경망을 학습하기 위하여 expert가 centralized sampling-based 알고리즘인 imitation learning을 사용하였다.
해당 논문의 contribution은 AIA 문제를 해결하기 위해 처음 GNN을 적용한 부분이다.
GNN을 적용하여 scalability, generalizability, robustness를 확보하였다.
II. Problem Formulation
2차원의 환경(environment) $T\subset \mathbb{R}^2$ 에 놓여있는 $N$ 개의 로봇이 있다. $T$ 에는 임의의 모양을 가지는 장애물의 set인 $O \subset T$ 가 놓여있다. 따라서 로봇은 장애물이 없는 공간인 $T_{\mathrm{free}} := T\ \backslash \ O$ 에서 움직인다.
$i$ 번째의 로봇는 시간 $t$ 에서 다음 robot dynamics $\mathbb{p}{i,t+1}=f(\mathbb{p}{i,t},\mathbb{u}{i,t}),\forall i\in{1,…,N}$ 에 따라 움직인다. $\mathbb{p}{i,t+1} \in T_{\mathrm{free}}$ 이고 $\mathbb{u}_{i,t} \in \mathcal{U}$ 이다. $\mathcal{U}$ 는 로봇의 할 수 있는 움직임의 유한한 집합이다.
로봇은 다음 hidden state dynamics $(1)$을 따르는 hidden state $\mathrm{x}_t \in \mathbb{R}^{d_x}$ 를 추정하기 위하여 협력하며 움직인다. $Q_t$ 는 noise covariance matrix이다.

로봇은 센서가 장착되어 잡음이 포함된 다음 측정값을 수집할 수 있다. 각 로봇에서 측정된 hidden state는 다음 observation model로 나타낸다. $y_{i,t}$ 는 시간 $t$ 에서 $i$ 번째 로봇의 측정값이다.

위 식에서 translation matrix ${ A, M }$ 과 noise covariance matrix ${ Q_t, R_i }$ 는 알고 있다고 가정한다.
A. Multi-Robot Active Information Acquisition
B. Problem Statement
III. Graph Neural Networks for AIA
A. Graph Representation of AIA problem


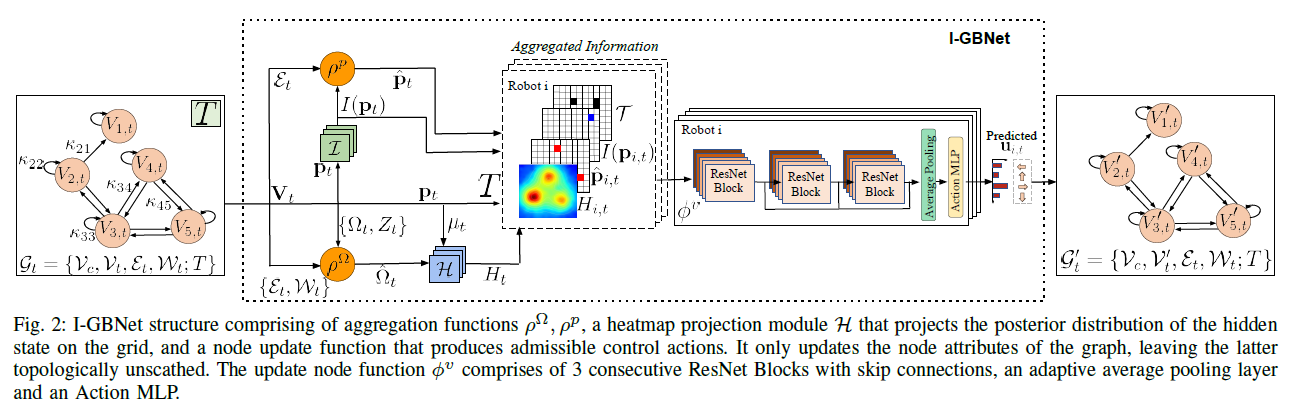
B. Information-aware Graph Block Network
Aggregation


Heatmap Projection
Node-Update

C. Properties of Graph Block Network
Proposition 1
(Proof 생략)
Proposition 2
(Proof 생략)
IV. Training and Architecture
A. Dataset and Training
B. Network Architecture
V. Experiment
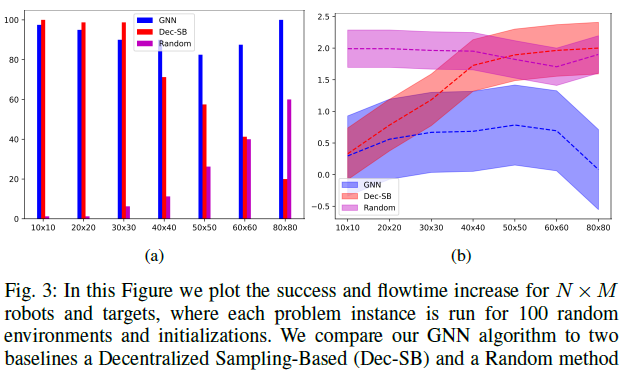
A. Scalability and Generalization
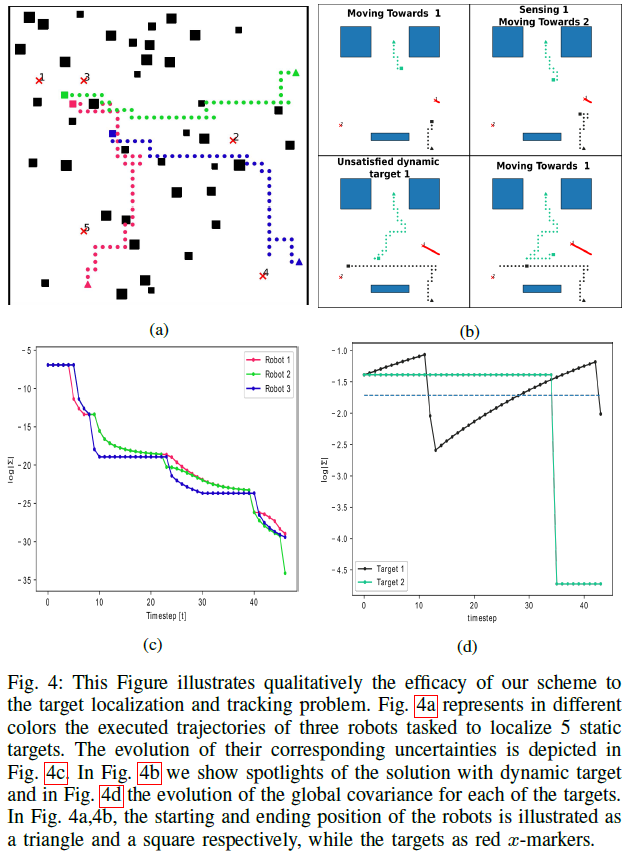
B. Target Localization and Tracking
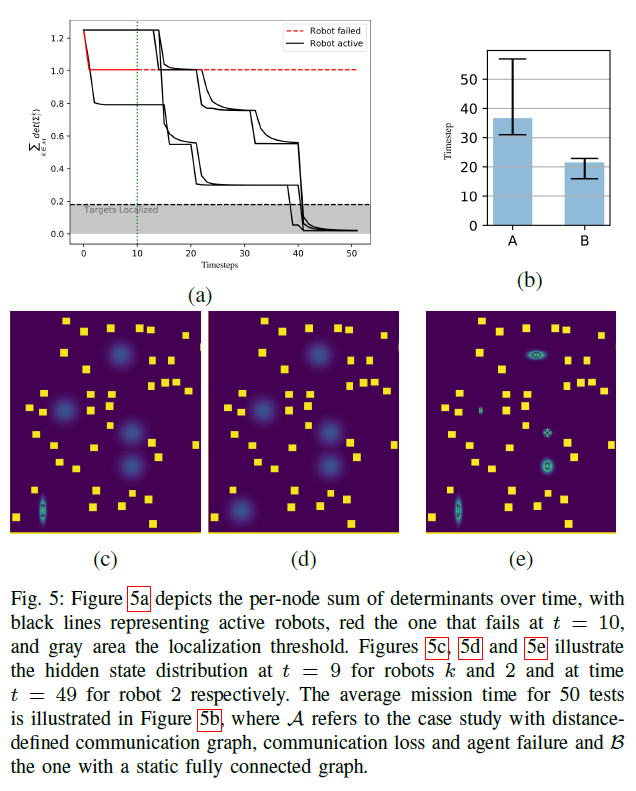
C. Robustness to Robot & Communication failure
VI. Conclusions
[^permutation_equivariance]: 임의의 permutation에 대해 함수가 commutative함.